商机详情 -
中国上片机全自动多功能玻璃钻孔机重量
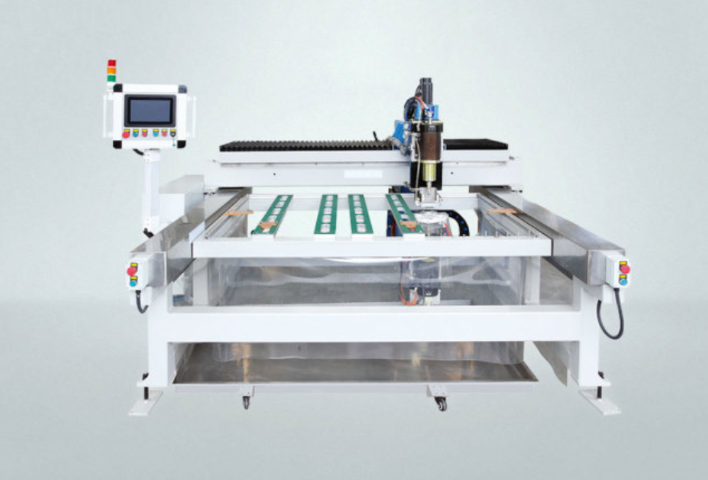
一种汽车玻璃深加工装置,其解决了现有去除玻璃边的工艺效率低、成本高、质量低的技术问题,其包括去边机械手和去边机械手支架,去边机械手包括回转体、回转轴套、回转轴承端盖、回转皮带轮、回转轴承座、回转轴承、电机同步带轮、减速机和机械手伺服电机,减速机与机械手伺服电机连接,电机同步带轮与减速机连接,回转皮带轮通过同步带与电机同步带轮连接,回转轴承座连接在去边机械手支架上,回转轴承与回转轴承座连接,回转轴套与回转皮带轮连接,回转轴承端盖与回转体连接,回转轴套套在回转体的上端,回转体的下端通过气缸连接有滚轮玻璃刀,回转体连接有顶压气缸,顶压气缸连接有顶块;其可广泛应用于玻璃板加工技术领域。市场应用:全自动多功能玻璃加工机组已成功应用于多家有名汽车玻璃加工企业,如福耀集团等。中国上片机全自动多功能玻璃钻孔机重量

银河光电张董事长年轻时发家于渔具制造,之后转战光伏行业取得成功,60岁果敢再创业进入汽车玻璃加工行业。从2012年到2017年,短短6年间再次取得巨大成功,其研发的汽车玻璃生产线获得多项国家发明专利,同时打破某外资企业在中国玻璃行业的垄断;其产品汽车玻璃生产线——配置FANUC Series 31i-B、Power Motion和0i-F系统——成功纳入全球头号汽车玻璃生产供应商福耀集团的制造设备采购名单,并且获得多条生产线订单。威海市银河光电设备股份有限公司作为专业的玻璃加工设备制造商,拥有完善的售后服务体系。能为客户提供设备安装调试、操作培训、维修保养等方面的服务支持,确保客户在使用过程中能够顺利解决问题并充分发挥设备的性能优势。中国银河光电全自动多功能玻璃钻孔机结构客户反馈:机组以其优异的性能和稳定的质量赢得了客户的众多赞誉和信赖。
一种玻璃钻孔机钻孔转台,其解决了现有的玻璃钻孔定位,受人为因素影响较大,存在定位偏差或不准确的技术问题,其设有吸盘座,吸盘座上设有橡胶吸盘,吸盘座外圆上设有O型圈,吸盘座下方设有旋转轴套,旋转轴套下方设有固定轴座,固定轴座内设有轴承,轴承上设有轴承衬套,旋转轴套内设有芯轴,芯轴上设有锥套,芯轴下设有旋转接头,旋转接头上设有止动板,旋转轴套上设有谐波减速机,谐波减速机上设有轴套,轴套上设有涨套,涨套上设有轴套同步带轮,轴套同步带轮上设有同步带,同步带上设有电机同步带轮,电机同步带轮上设有伺服电机。本实用新型可广泛应用于玻璃钻孔定位。
新能源汽车特斯拉轿车全景天窗玻璃全部从意大利进口,这种全景天窗玻璃的预处理装备也依赖进口。为了打破国外垄断,受福耀玻璃工业集团股份有限公司以及信义玻璃控股有限公司的委托,我公司决定研制新能源汽车特型玻璃预处理全自动切掰磨生产线。公司成立了项目组,项目组设立电气研发小组和机械研发小组,通过国内外专业资料的检索,对国内外相关技术、设备、产品情况进行了充分的调研,制定了切实可行的研发实施方案。我公司研制的新能源汽车特型玻璃预处理全自动切掰磨生产线精度高、效率高、性价比高,市场需求很大。随着国内市场占有率的逐渐提升,产品的未来销量不可估量。服务体系:公司拥有完善的售后服务体系和技术支持团队,能够为客户提供及时、专业的技术支持和售后服务。

银河光电以前是生产太阳能、非晶硅、电气组件的设备工厂。2012年,在光伏市场不景气的情况下,我们考虑转产。 当时正好看到了中国汽车工业蓬勃发展,但当时汽车玻璃加工行业的设备全部依靠进口,中国也没有高等的设备,只有一些低端的设备,导致汽车玻璃加工设备的市场被国外进口设备垄断。 为了打破垄断,也是为了体现中国汽车玻璃预处理生产加工设备的国产化,我们就选择了汽车玻璃预处理设备,投入巨大的资金来研发全自动多功能玻璃加工机组。速度快、产量高、成本低:机组具有生产效率优势,能够大幅降低生产成本。山东进口全自动多功能玻璃钻孔机维修
威海银河光电股份有限公司的全自动多功能玻璃加工机组拥有多个系列和规格,以满足不同客户的需求。中国上片机全自动多功能玻璃钻孔机重量
采用一致性控制解决新能源汽车特型玻璃加工过程质量管控问题。提出一种既能够保证全局好,又同时可以具有指定收敛速度的分布式协同设计方法。通过使用逆设计方法,同时考虑无领头者以及领导-跟随多智能体系统一致性意义下的全局问题。提出一系列具有指定收敛速度的全局分布式协同方法。通过使用区域极点配置方法,满足指定收敛速度的好控制增益可以通过求解线性矩阵不等式来给出。在此基础之上,提出一种改进的LQR好方法。针对有向图上的连续时间线性多智能体系统的一致性性能的调节问题进行研究。提出评估多智能体的一致性性能的两个指标:收敛速度和阻尼度。前者用来刻画多智能体系统达到协同一致的快慢,后者则被用来评估达到一致性过程中多智能体系统状态的震荡行为。针对智能体的一致性问题提出一种全新的控制协议设计方法。该协议可以通过调节自身的参数使得多智能体系统的状态渐近地按照指定的收敛速度和阻尼度达到一致。解决有向网络拓扑下连续时间线性多智能体系统的全局控制问题。领导-跟随和无领导一致性问题都被考虑了。基于线性系统逆控制理论,给出控制协议的参数表达式。中国上片机全自动多功能玻璃钻孔机重量