商机详情 -
传感器全自动多功能玻璃钻孔机方案
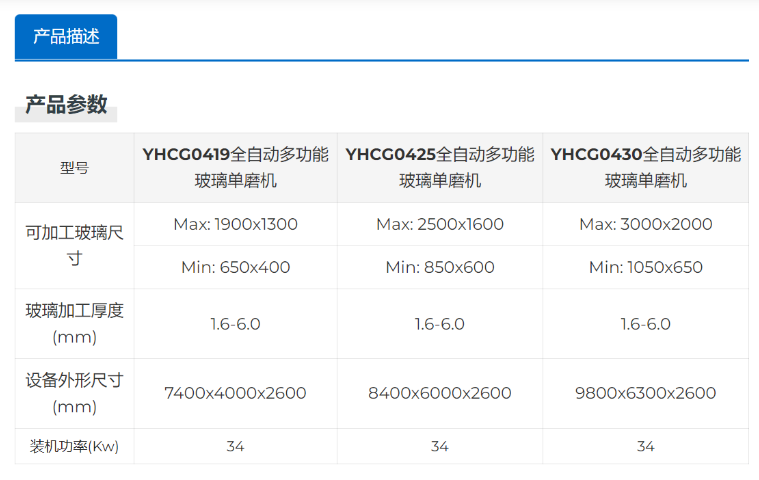
全自动多功能玻璃加工机组由两台工业机器人(YHCG01-00汽车玻璃切磨机和YHHG01-00汽车玻璃钻孔机)组成,整个机组采用数控系统控制各部分联合动作,将玻璃完成上片、定位、切割、去边、磨边、钻孔、出片等多功能的汽车玻璃加工全自动生产线。 本项目的实施,可实现全自动多功能玻璃加工机组国产化,各项指标可以与世界上先进的玻璃加工生产线相媲美,替代进口,为国内玻璃精加工企业提供先进技术,质量可靠、低成本、高效率的装备,大幅度降低企业生产成本,改变汽车玻璃加工全自动生产线完全依靠进口局面,为国内全自动玻璃加工行业的发展开启了新的篇章。机组采用了多项先进技术,如数控技术、工业机器人技术等,使产品具有更高的技术含量和附加值。传感器全自动多功能玻璃钻孔机方案

产品应用: 全自动多功能玻璃加工机组广泛应用于汽车玻璃、建筑玻璃、家具玻璃等领域的加工生产。在汽车玻璃加工领域,可实现汽车前档、后档、侧窗等不同部位玻璃的全自动加工,满足汽车制造企业对玻璃的高精度、大批量生产需求。在建筑玻璃加工领域,可实现建筑门窗玻璃、幕墙玻璃的切割、磨边、钻孔等加工工序,生产出符合建筑设计要求的各种规格和形状的玻璃。在家电玻璃加工领域,可实现家电产品如冰箱、烤箱、微波炉等玻璃门的加工,为家电制造企业提供高质量的玻璃配件。信义集团全自动多功能玻璃钻孔机重量一种异形玻璃自动定位装置,主要用于实现异形玻璃的自动定位。
全景天窗,是安装在车顶的大面积安全玻璃,它打破了传统汽车天窗的尺寸和视野限制,为乘客提供了更加开阔的车内空间。安装全景天窗玻璃让整车颜值、空间感更强,观赏体验感更加舒适。据统计,配备全景天窗车型的渗透率从2014年的62.5%提升至2019年73.1%。全景天窗玻璃尺寸超大、厚度薄,精度要求高,所以加工难度很大。我公司研制的新能源车特型玻璃预处理切掰磨线可用于全景天窗玻璃预处理的智能装备。该智能装备安装了FANUC数控系统,把玻璃冷加工的预处理工艺与物料的搬运机械手相结合,一次完成玻璃的上片、切割、掰边、磨边、下片等预处理加工工艺过程,创造性地实现了玻璃无模板掰边、废料自动传送等复杂不规则玻璃图形加工,具有高精度、高加工速度和智能化的特点。
现阶段国内很少有设备使用多智能体的智能控制器对设备进行控制的,多智能体的智能控制器进行控制时编程难度大于使用PLC编程,同时需要克服信号干扰,以及恶劣工作环境等因素带来的影响。玻璃深加工智能化柔性生产线即是把玻璃加工设备和运输设备组成生产线,自主开发多智能体的智能控制器作为信息集控板,上位机作为整个柔性智能生产线的监督者和指挥者,通过信息集控板完成对各个单机设备的监控与管理。上位机具有可视化的人机交互界面,能够对整条生产线进行监控管理,通过人机交互界面上位机可以方便的对整条生产线各台设备进行控制,如启动、停止、暂停、调速、智能化调度等功能。装机功率:切掰磨机为50Kw,钻孔机为20Kw。

全自动多功能玻璃加工机组广泛应用于多个领域,包括但不限于: 汽车玻璃行业:能够满足不同车型、不同规格的汽车玻璃加工需求,为汽车制造商提供高质量的玻璃产品。 建筑玻璃行业:可用于加工各种建筑玻璃,如幕墙玻璃、门窗玻璃等,满足建筑行业对玻璃质量和精度的要求。 家具玻璃行业:能够满足家具制造商对玻璃面板、玻璃隔断等产品的加工需求,提供高质量的家具玻璃产品。 电子电器行业:可用于加工触摸屏、显示屏等电子产品的玻璃面板,满足电子电器行业对玻璃面板质量和精度的要求。 光学仪器行业:可用于加工各种光学镜片、棱镜等光学元件,满足光学仪器行业对玻璃元件的精度和稳定性的要求。客户反馈:机组以其优异的性能和稳定的质量赢得了客户的众多赞誉和信赖。数控系统全自动多功能玻璃钻孔机价格
机组2015年12月通过了“全自动多功能玻璃加工机组”鉴定验收,收到大家的一致好评。传感器全自动多功能玻璃钻孔机方案
采用一致性控制解决新能源汽车特型玻璃加工过程质量管控问题。提出一种既能够保证全局好,又同时可以具有指定收敛速度的分布式协同设计方法。通过使用逆设计方法,同时考虑无领头者以及领导-跟随多智能体系统一致性意义下的全局问题。提出一系列具有指定收敛速度的全局分布式协同方法。通过使用区域极点配置方法,满足指定收敛速度的好控制增益可以通过求解线性矩阵不等式来给出。在此基础之上,提出一种改进的LQR好方法。针对有向图上的连续时间线性多智能体系统的一致性性能的调节问题进行研究。提出评估多智能体的一致性性能的两个指标:收敛速度和阻尼度。前者用来刻画多智能体系统达到协同一致的快慢,后者则被用来评估达到一致性过程中多智能体系统状态的震荡行为。针对智能体的一致性问题提出一种全新的控制协议设计方法。该协议可以通过调节自身的参数使得多智能体系统的状态渐近地按照指定的收敛速度和阻尼度达到一致。解决有向网络拓扑下连续时间线性多智能体系统的全局控制问题。领导-跟随和无领导一致性问题都被考虑了。基于线性系统逆控制理论,给出控制协议的参数表达式。传感器全自动多功能玻璃钻孔机方案