商机详情 -
模块化快速原型控制器优势
电机控制算法是通过一系列的数学模型、控制策略和计算方法,实现对电机运动状态的精确控制。它涵盖了电机启动、加速、减速、停止等全过程的控制,以及电机参数调整、故障诊断等辅助功能。电机控制算法的性能直接影响到电机的运行效率、能耗、稳定性以及使用寿命。电机控制算法的评估是确保电机控制系统性能优良的关键环节。通过对电机控制算法的评估,可以了解算法在实际应用中的表现,发现潜在的问题,为算法的优化提供依据。同时,电机控制算法的评估还可以为电机的选型、控制系统的设计提供参考,有助于提高整个电机控制系统的性能。快速原型控制器采用高性能硬件平台,能够支持复杂控制任务,满足高性能要求。模块化快速原型控制器优势
高精度快速原型控制器采用了高性能的硬件平台和丰富的软件资源,能够满足多种项目的研发需求。无论是简单的控制任务还是复杂的系统集成,都可以通过配置不同的软件和硬件资源来实现。高精度快速原型控制器具有较低的使用门槛,使得更多的工程师和技术人员能够轻松上手。控制器通常提供了友好的用户界面和简洁的操作流程,使得工程师们可以更加专注于控制算法的设计和优化,而无需过多关注底层硬件的实现。高精度快速原型控制器以其短研发周期、高效率、易部署、实时监测、资源丰富和使用门槛低等优点,在控制领域展现出了强大的竞争力和广阔的应用前景。未来,随着科技的不断发展和市场的不断变化,高精度快速原型控制器将继续发挥其在控制系统设计和优化中的重要作用,为工业自动化、机器人技术、航空航天等领域的发展注入新的动力。山西实时仿真系统开发快速原型控制器可以通过升级硬件和软件来扩展其功能,以满足更高级别的控制需求。
高精度快速原型控制器具有易于部署的优点。通过控制算法的直接部署,工程师们无需过多关注底层硬件的细节,从而减轻了底层开发的负担。此外,控制器还提供了丰富的接口和驱动程序,使得与其他设备的连接变得更为简单和便捷。这种易于部署的特性使得高精度快速原型控制器在多个项目中得到了普遍应用。无论是工业自动化生产线上的机器人控制,还是航空航天领域的飞行器导航,都可以看到这种控制器的身影。高精度快速原型控制器具备实时监测和在线调参的功能。工程师们可以通过控制器提供的实时监测界面,实时查看控制算法的运行状态和效果,从而及时发现并解决问题。同时,在线调参功能使得工程师们可以根据实际情况对控制参数进行灵活调整,以达到较佳的控制效果。这种实时监测和在线调参的便利性提高了控制系统的稳定性和可靠性。工程师们可以更加准确地控制被控对象的行为,实现更加精确和高效的控制。
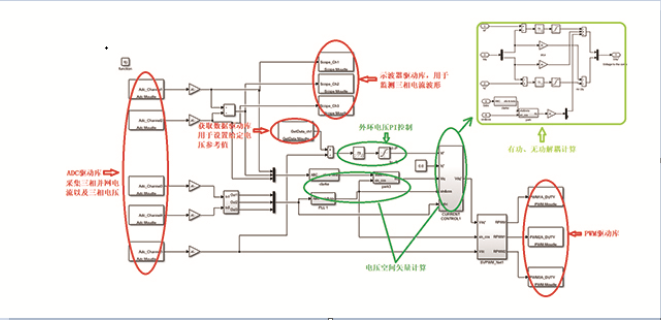
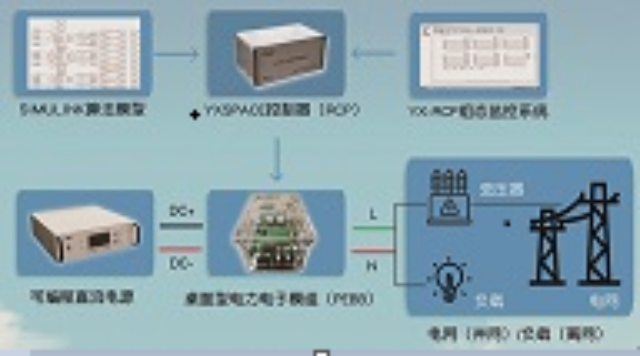
RCP的主要功能在于其能够快速地验证控制算法的有效性。通过将用图形化高级语言编写的控制算法下载到原型控制器上,科研人员可以迅速在实际环境中测试算法的性能,无需长时间等待嵌入式芯片上的算法实现。这种快速的验证过程缩短了研发周期,使得科研人员能够更快地识别并解决潜在问题,加速成果的产出;RCP使用实时硬件来运行Simulink控制算法,控制真实被控对象,如开关、电磁阀、电机、发动机等。这种集成方式使得科研人员能够在开发初期就进行实际测试,验证控制算法在实际环境中的表现。由于被控对象是真实的,因此验证结果更具可靠性和实用性。快速原型控制器凭借其独特的优势,在多个科研得到了普遍应用。

大数据快速原型控制器具有高度的灵活性和可扩展性。它可以根据企业的实际需求进行定制,满足不同的业务场景和应用需求。同时,随着企业业务的不断发展和数据量的不断增加,大数据快速原型控制器可以方便地进行扩展和升级,确保系统的稳定性和可靠性。传统的控制系统开发往往需要投入大量的人力、物力和时间,而且存在较高的风险。而大数据快速原型控制器采用快速原型开发的方法,能够在短时间内构建出系统的原型,并进行验证和优化。这种方法降低了开发成本和风险,提高了开发效率和质量。快速原型控制器采用标准化接口和协议,能够与其他标准设备或系统进行互操作,提高系统兼容性。模块化快速原型控制器优势
快速原型控制器在研发过程中的实时监测和在线调参功能,使得用户能够及时发现并解决控制算法中的问题。模块化快速原型控制器优势
快速原型控制器的优势——采用高级DSP芯片作为运算主要部件,仿真速度更快,资源更丰富,其仿真结果针对实际研究更具有参考性;使用门槛低,会Matlab仿真即可完成实验测试工作,所有测试工作只需一人即可完成;在Matlab中设计的控制算法自动生成代码,自动加载到实时目标机中运行,避免了繁琐的编程和Debug工作;模型与硬件接口链接简单,只需记住端口编号即可,更不用配置硬件各类细节,免去一切不必要的麻烦;性价比高,在同等功能的前提下,YXSPACE成本更低;具备自主编写的驱动库,可以直接导入到Simulink库中,用户可以直接在Matlab软件中拖动响应的硬件元件库,将模型中的数据直接与硬件对接,无需再花费时间去查询硬件映射。多种库文件,可适用于各种工程调试需求。模块化快速原型控制器优势