商机详情 -
安徽室内巡检机器人物联网系统
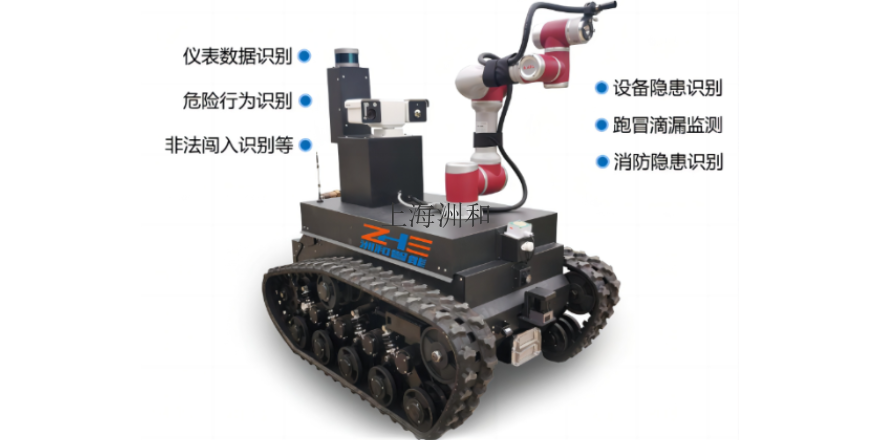
上海洲和智能科技凭借先进的机器人技术,推出了室内、室外、防爆系列巡检机器人,为您的各类场所提供智能巡检服务。室内巡检机器人:我们的室内巡检机器人适用于各类公共场所,如机场、高铁站、学校、商场等。它集成了多种传感器,能够实现企业展示、导航指引、语音交互、人脸识别、危险行为识别等多项功能。无论是引导来访者,还是监控场所安全,室内巡检机器人都能为您提供便捷、高效的服务。室外巡检机器人:在工业厂区、大型建筑施工现场等室外环境,我们的室外巡检机器人同样表现出色。它具备强大的环境适应能力和自主导航功能,能够在复杂环境中进行高精度、强灵活性的自动驾驶。此外,室外巡检机器人还能进行红外测温、振动测量、声音识别等功能监测,确保设备运行的稳定性和安全性。防爆巡检机器人:针对石油化工行业、煤炭业等需要防爆的场所,我们特别推出了防爆巡检机器人。这款机器人采用防爆设计,符合国家相关防爆标准,能够在易燃易爆环境中安全运行。它具备设备隐患识别、危险行为识别、非法闯入识别、跑冒滴漏监测、消防隐患识别、仪表数据识别等多项功能,为企业的安全生产提供有力保障。发酵蒸馏用巡检机器人,智能监控保生产,提高酿酒质量与效率。安徽室内巡检机器人物联网系统

上海洲和智能科技有限公司研发的室内、室外及防爆巡检机器人,适用于多种公共场所、工业厂区、石油化工及煤炭业等多元环境。这些机器人集成了高质量的传感器技术和智能巡检系统,能够自主规划路径,实现高精度、高灵活性的巡检作业。无论是在复杂多变的室外环境,还是要求严苛的防爆区域,它们都能稳定运行,提供实时、准确的数据支持。上海洲和智能科技的巡检机器人,以其精益的性能和可靠性,成为各行业安全生产和运营的有力保障。上海城市巡检机器人方案设计巡检无忧,机器人助力企业前行。
技术特点自主路径规划:机器人具备可靠的自主路径规划功能,能够在复杂环境下实现高精度、强灵活性的自动驾驶。室内外复杂环境定位:通过综合运用多种传感器系统,如超宽带无线基站组网定位(UWB)、激光雷达(LIDAR)等,实现室内外复杂环境下的精细定位。全域障碍物避障:通过激光雷达、环向超声波传感器及云台相机等组合,实现对机器人所处环境的AI识别,确保在自主巡检过程中的静态点位障碍区主动避障和复杂环境下动态障碍物的实时避障功能。手势指挥的人机交互体验:机器人能够识别不同光线环境下作业人员的手势信息,并通过自建的手势识别数据库与机器人实现实时的手势交流互动,对机器人进行动作控制。
巡检机器人在石油储罐的液位监测方面,拥有装载不同传感器的能力以进行精确检测。以下是几种可能的实现方式:激光测距传感器:巡检机器人可以配备激光测距传感器来监测石油储罐的液位。这种传感器通过发射激光束并接收其反射回来的信号,来测量液位与传感器之间的距离。激光束在空气中传播的速度是恒定的,因此通过计算激光从发射到接收的时间差,可以准确计算出液位的高度。压力传感器:另一种方法是使用压力传感器。通过在石油储罐底部安装压力传感器,机器人可以间接测量液位。随着液位的上升,储罐底部的压力也会相应增加。通过监测这种压力变化,并结合储罐的形状和尺寸,可以推算出液位的高度。红外液位传感器:巡检机器人也可以配备红外液位传感器来进行液位检测。这种传感器利用红外线的特性,通过发射红外光并接收其反射回来的信号,来测量液位。红外光在液体和空气之间的反射特性不同,因此可以通过分析反射信号来确定液位的位置。这些方法各有优势,可以根据具体的应用场景和需求选择合适的传感器进行液位监测,确保石油储罐的安全和稳定运行。机器人巡检,让安全管理更轻松。

上海洲和智能科技的室内巡检机器人,这些机器人不仅可以在机场、高铁站等交通枢纽中提供高效服务,还能在学校、商场、博物馆、展览中心等公共场所发挥重要作用。以下是洲和智能科技室内巡检机器人的主要应用功能:企业展示:机器人可以展示企业形象的,在展厅或会议室中向访客展示企业的发展历程、产品特点、技术创新等信息。导航指引:在机场、高铁站等大型交通枢纽中,机器人可以实时提供准确的导航服务,帮助旅客快速找到登机口、候车室、卫生间等关键位置。语音交互:机器人具备先进的语音识别和合成技术,可以与用户进行自然流畅的对话交流。人脸识别:机器人具备人脸识别功能,可以识别并记录用户信息,为企业或场所提供安全保障。危险行为识别:机器人能够实时监测周围环境,识别潜在的危险行为,如火灾、非法入侵等。火灾识别:机器人配备了先进的烟雾探测器和温度传感器,能够及时发现火灾隐患并报警。上海洲和智能科技的室内巡检机器人凭借其多样化的功能和***的性能,在多个领域展现出广阔的应用前景。随着技术的不断进步和市场的不断拓展,相信这些机器人将在未来为更多用户带来便捷和安全的体验。光伏发电组件巡检机器人,航拍影像采集,保障发电高效稳定。福建电力化工巡检机器人工程
实时监测,巡检机器人守护生产安全。安徽室内巡检机器人物联网系统
室内电力巡检机器人,首要任务是明确自身位置、了解当前巡检任务,并高效、安全地前往指定地点完成巡检工作。因此,我们提出的解决方案中的机器人需要满足以下关键功能需求:高效导航与定位能力:机器人应具备快速且准确的导航与定位功能,确保能够准时、无误地驶向既定的巡检任务地点。这要求机器人配备高精度的传感器和先进的导航算法,以实现复杂室内环境中的自主导航。智能避障与防撞功能:在行驶过程中,机器人应能够智能识别并回避各种障碍物,包括固定和移动的物体。自动升降门通过能力:考虑到变电站等电力设施中常设有升降门,机器人应具备自动识别和通过升降门的能力。这要求机器人能够识别门的开关状态,并在必要时自主执行开门动作或通过门的缝隙。可视化操作界面:为方便操作人员使用,机器人应配备直观、易用的可视化操作界面。通过该界面,操作人员可以直接设定机器人的巡检任务、查看其工作状态,以及获取实时的巡检数据和图像。远程遥控与拍照功能:在特殊情况下,操作人员可能需要远程遥控机器人完成巡检任务。因此,机器人应支持远程遥控功能,包括前进、后退、转向、停止等操作。机器人还应具备拍照功能,以便根据实际需要拍摄并传输巡检现场的照片。安徽室内巡检机器人物联网系统