新闻中心 - 温州坤格自动化科技有限公司
-
 温州飞剪电机代理商
温州飞剪电机代理商伺服惯量比和刚性关系一般来说,小惯量的电机制动性能好,发动,加快中止的反响很快,高速往复性好,适合于一些轻负载,高速定位的场合。中、大惯量的电机适用大负载、平稳要求比较高的场合,如一些圆周运动机构和一...
发布时间:2024.12.27 -
 泰顺液压伺服电机代理商
泰顺液压伺服电机代理商伺服电机与步进电机控制精度不同两相混合式步进电机步距角一般为1.8°、0.9°,五相混合式步进电机步距角一般为0.72°、0.36°。也有一些高性能的步进电机通过细分后步距角更小。如三洋公司(SANY...
发布时间:2024.12.26 -
 丽水水泵伺服电机哪家好
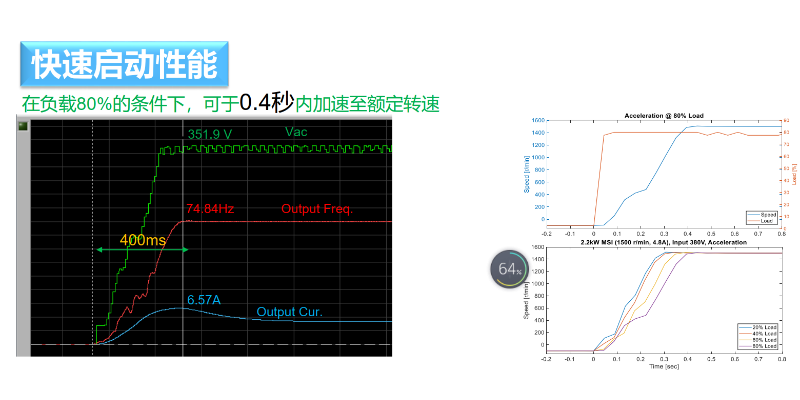
丽水水泵伺服电机哪家好伺服电机与步进电机速度响应性能不同步进电机从静止加速到工作转速(一般为每分钟几百转)需要200~400毫秒。交流伺服系统的加速性能较好,以三洋400W交流伺服电机为例,从静止加速到其额定转速3000R...
发布时间:2024.12.26 -
 温州位置控制电机服务商
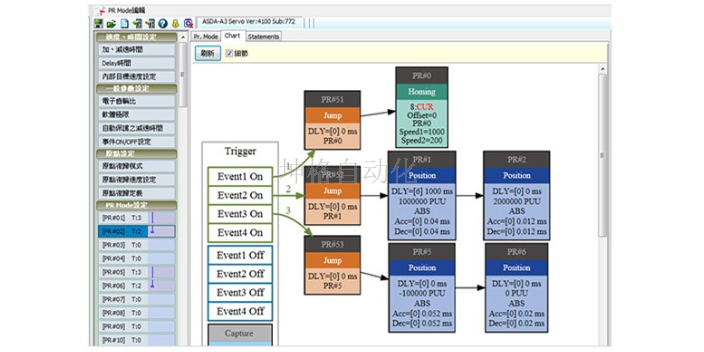
温州位置控制电机服务商伺服全闭环控制原理伺服全闭环控制是一种基于反馈的控制方式。它通过对电机旋转角度的测量,将测量结果与期望旋转角度进行比较,从而生成控制信号,实现对电机运动的精确控制。具体来说,这种控制方式包括三个基本组...
发布时间:2024.12.26 -
 丽水锁螺丝电机供应商
丽水锁螺丝电机供应商EtherCAT是一种用于工业自动化领域的实时以太网总线通信协议。它采用了主从结构,具有高效、实时和可靠的特点,广泛应用于工业控制系统中。EtherCAT总线的工作原理是基于以太网技术的。以太网是一种...
发布时间:2024.12.26