商机详情 -
12伏直流电机
三种控制方式对比:(1)如果对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。(2)如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一点。如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高要求。(3)就伺服驱动器的响应速度来看,转矩模式运算量*小,驱动器对控制信号的响应*快;位置模式运算量*大,驱动器对控制信号的响应*慢。(4)对运动中的动态性能有比较高的要求时,需要实时对伺服电机进行调整。那么如果控制器本身的运算速度很慢(比如PLC,或低端运动控制器),就用位置方式控制。如果控制器运算速度比较快,可以用速度方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率(比如大部分中**运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是****控制器才能这么干,而且,这时完全不需要使用伺服电机。交流换向器电动机 又分为单相串励电动机、交直流两用电动机和推斥电动机。12伏直流电机
直流伺服电机加抱闸的作用:直流伺服电机带抱闸,抱闸的作用只是说在没有电的情况下,防止电机有误动作,在有电的情况下,电机有始能,就不会有误动作,特殊情况,比如说在电机选小的情况下,始能才控制不住电机。在失电的情况下,如果是水平运动,没有外力的情况下,电机是不会有误动作,可是在垂直方向/有一定倾斜角度/有外力的作用下,这个时候要电机就要加抱闸,或者机械加抱死装置。以保证设备及人员的安全。什么是伺服电机?伺服系统(servomechanism)是使物体的位置、方位、状版态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机权接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移。g3电机一旦闸机电机出现故障,整个闸机系统的运作都会受到影响。
在高频冲击负载如电焊机、电镀电源、电解电源等场合,电压经常出现闪变;在一个车间中,有几百台变频器等容性整流负载在工作时,电网的谐波非常大,对于电网质量有很严重的污染,对设备本身也有相当的破坏作用,轻则不能够连续正常运行,重则造成设备输入回路的损坏。可以采取以下的措施:(1)在高频冲击负载如电焊机、电镀电源、电解电源等场合建议用户增加无功静补装置,提高电网功率因数和质量。(2)在变频器比较集中的车间,建议采用集中整流,直流共母线供电方式。建议用户采用12脉冲整流模式。优点是,谐波小、节能,特别适用于频繁起制动、电动运行与发电运行同时进行的场合。(3)变频器输入侧加装无源LC滤波器,减小输入谐波,提高功率因数,成本较低,可靠性高,效果好。(4)变频器输入侧加装有源PFC装置,效果*好,但成本较高。
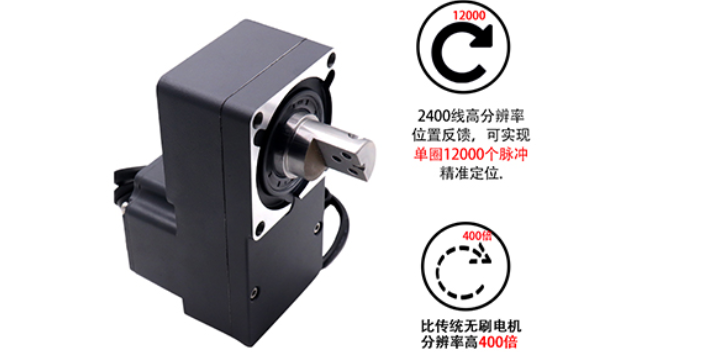
位置控制位置控制普遍应用在各种定位场合,可以直接替换各种步进传动系统。一般情况下伺服电机通过接受脉冲来进行位置控制,脉冲的个数决定了位置,脉冲的频率决定了电机运行的速度。一个脉冲对应的位置当量,取决于机械结构和电子齿轮。注意事项(1)每一个点位的位移由两个参数组成,实际编程的位移是由两个参数的代数和组成,注意两个参数的单位。(2)注意搜索参考点的速度,若速度过大可以设定软起动加减速,以减小对机械的冲击。(3)点位控制中,1CN可以不接任何输入、输岀即可实现。(4)目前只能顺序换步。(5)用户可以通过触摸屏和伺服通过Modbus协议进行通在人行通道闸机设计时,需要通过不同的电机带中通道门体的运动来达到限制和放行的管理效果。
伺服电机.伺服电机是自动控制系统中的实行元件,它的明显特征是调节。在有调节数据信号时,伺服电机就运转,且转速高低正比例于调节电压的高低,除去调节数据信号电压后,伺服电机就立刻停下运转。伺服电机运用颇深,近乎全部的智能控制系统中须要采用。比如测速电机,它的输出正比例于电机的速度;或是齿轮盒推动电位器单位,它的输出正比例于电位器挪动的地方.当这种电机与适度的功率调节反馈环协调时。它的速度能够与外部振荡器频率精细锁死,或与外部位移调节旋钮做好锁定。唱机或激光唱机的轮盘常见伺服电机。天线运转系统,遥控模型飞机和舰船也都需要采用伺服电机。智能闸机系统离不开可靠的闸机电机作为主要动力。g3电机
人行通道闸机,防水防尘,适应各种环境。12伏直流电机
只考虑到电机的动力问题,对于直线运动用速度,加速度和所需外力表示,对于旋转运动用角速度,角加速度和所需扭矩表示,它们均可以表示为时间的函数,与其他因素无关。很显然。电机的最大功率P电机,比较大应大于工作负载所需的峰值功率P峰值,但**如此是不够的,物理意义上的功率包含扭矩和速度两部分,但在实际的传动机构中它们是受限制的。用峰值,T峰值表示比较大值或者峰值。电机的比较大速度决定了减速器减速比的上限,n上限=峰值,比较大/峰值,同样,电机的最大扭矩决定了减速比的下限,n下限=T峰值/T电机,比较大,如果n下限大于n上限,选择的电机是不合适的。反之,则可以通过对每种电机的***类比来确定上下限之间可行的传动比范围。只用峰值功率作为选择电机的原则是不充分的,而且传动比的准确计算非常繁琐。12伏直流电机