商机详情 -
人行通道闸机电机
有刷直流可分为永磁直流电动机和电磁直流电动机。电磁直流电动机又分为串励直流电动机、并励直流电动机、他励直流电动机和复励直流电动机。永磁直流电动机又分为稀土永磁直流电动机、铁氧体永磁直流电动机和铝镍钴永磁直流电动机。按起动与运行方式分类根据电动机按起动与运行方式不同,可分为电容起动式单相异步电动机、电容运转式单相异步电动机、电容起动运转式单相异步电动机和分相式单相异步电动机。4.按用途分类可分为驱动用电动机和控制用电动机。驱动用电动机又分为电动工具(包括钻孔、抛光、磨光、开槽、切割、扩孔等工具)用电动机、家电(包括洗衣机、电风扇、电冰箱、空调器、录音机、录像机、影碟机、吸尘器、照相机、电吹风、电动剃须刀等)用电动机及其它通用小型机械设备(包括各种小型机床、小型机械、医疗器械、电子仪器等)用电动机。交流换向器电动机 又分为单相串励电动机、交直流两用电动机和推斥电动机。人行通道闸机电机
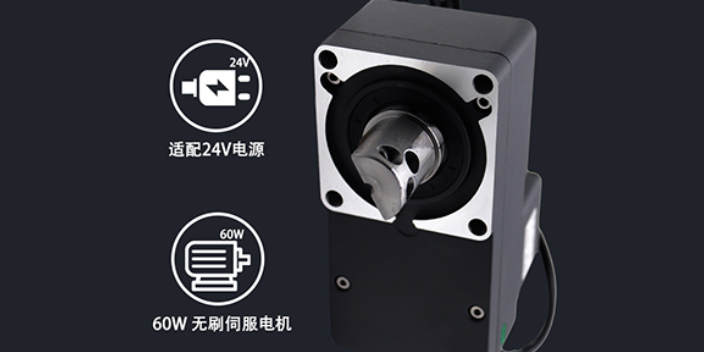
无刷伺服电机通过使用电子控制器来控制电机的转速和位置。电子控制器通过检测电机的转子位置和速度,并根据预设的控制算法来调整电机的电流和电压,以实现精确的位置和速度控制。
无刷伺服电机通常由电机本体、电子控制器和传感器组成。电机本体由转子和定子组成,转子上安装有永磁体,定子上安装有线圈。电子控制器负责接收控制信号,并根据信号控制电机的运行。传感器用于检测电机的转子位置和速度,以提供反馈信号给电子控制器。
无刷伺服电机多面应用于工业自动化、机器人、航空航天、医疗设备等领域,其高效、精确的控制特性使其成为许多应用中的理想选择。 ytw电机伺服直流电机的换向一直是通过石墨电刷与安装在转子上的环形换向器相接触来实现的。

控制方式一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。1、速度控制速度环框图(1)速度制即电机按照给定的速度指令进行运转(2)速度控制的应用场合相当广泾用场合有:需要快速响座的连续调速系统;由上位闭环的定位系统;需要多栏速度进行快速切换的系统。(3)通常伺服的速度给定为模拟量,即模拟量幅值的大小决定了给定速度的大小,正负决定电机应关系取决于速度指令增益(Pn300)。注意事项(1)速度环增益Pn102,通常是设定高一些以使得整个系统响应快一些,电机刚性也会增强。但是增益大了可能导致系统振动。一般负载惯量大的场合该参数设得大一些。(2)速度环积分时间Pn103,它的作用是消除静差,数值设得越大响应越慢,到达指令时间越长。通常负载惯量越大,积分时间应设定得越大。(3)上位机作闭环时,应尽量不要设置软起动减速时间参数Pn306、Pn307。
翼闸确定方案。在与客户沟通时确定方案,场地宽度多少,长度多少,明确能装几台机,是选择立式翼闸,还是桥式翼闸,立式翼闸外形尺寸:420x330x980(mm),桥式翼闸外形尺寸:1200x280x1000(mm),,翼闸杆到机箱尺寸510mm,即立式翼闸占地面积:420x(330+510),桥式翼闸占地面积1200x(280+510),在确定选型时充分考虑闸机与闸杆留有空隙,每台翼闸的占地面积,摆放位置,如何布线(是走明线还是走暗线),方案定了,目标定了,等待翼闸到现场。二、定位置布线。根据以前确定的方案,明确翼闸的安装具体尺寸,做好预埋管,闸机与闸机之间留50-100mm的间隙,能打开上盖以防调整机器,维修等,千万不能不留空隙,闸机与闸机之间预埋2根6分-8分的塑胶管,一根胶管走电源线(强电),另一根胶管走信号线(弱电),不能将电源线和信号线同时走一个胶管,这样会影响到通讯的效果,预埋管要露出地面30-40mm高,走线立式翼闸应在机器中间底部为好,桥式翼闸应在两侧面为好(因为桥式翼闸中间底部为封闭式)。三、固定调整。固定底部用4-M10x100的膨胀螺丝固定,不能摇摆,整机水平,外观整体一致,(固定前比较好用细线拉直线,纵横向一致),翼闸与翼闸之间采用串联方式,逐一调整,直线能正常使用。电机是指依据电磁感应定律实现电能的转换或传递的一种电磁装置。电机(俗称马达)。
在这里分享一些我工作中遇到的一些问题,有的是我写的程序,有的是看书一些心得,分享到这上面,如果有不妥的地方,希望见谅,能看得过去,就看看,看不过去的话,就当啥也没用,***主要分享之前的一个项目的伺服控制遇到的问题。这个项目是我做的**个非标项目,其中吃了很多苦,因为很多东西都是**次使用,原理都是慢慢进行摸索出来的,这里讲的齿轮比也就是其中一项,当时也搜集了很多的资料。这里写其中的一个:如果知道编码器线数C=2500,减速比为1:1,节距pitch=8mm,一个脉冲的移动量是▲p=0.001mm,那么计算电子齿轮比是:首先计算编码器的分辨率Pt=4*C=10000P/r交流伺服电动机的工作原理与电容运转式单相异步电动机虽然相似,但前者的转子电阻比后者大得多。人行通道闸机电机
感应电动机 又分为三相异步电动机、单相异步电动机和罩极异步电动机等。人行通道闸机电机
三种控制方式对比:(1)如果对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。(2)如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一点。如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高要求。(3)就伺服驱动器的响应速度来看,转矩模式运算量*小,驱动器对控制信号的响应*快;位置模式运算量*大,驱动器对控制信号的响应*慢。(4)对运动中的动态性能有比较高的要求时,需要实时对伺服电机进行调整。那么如果控制器本身的运算速度很慢(比如PLC,或低端运动控制器),就用位置方式控制。如果控制器运算速度比较快,可以用速度方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率(比如大部分中**运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是****控制器才能这么干,而且,这时完全不需要使用伺服电机。人行通道闸机电机